|
understanding the brain |
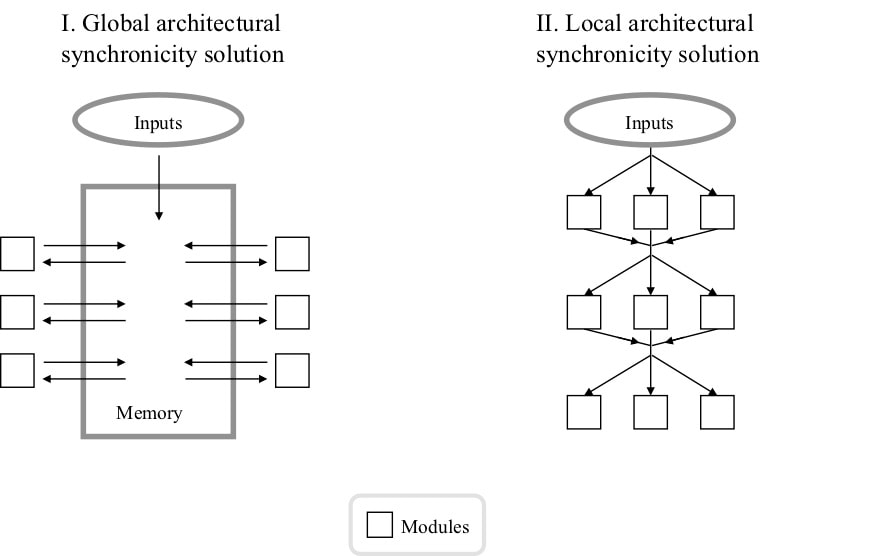
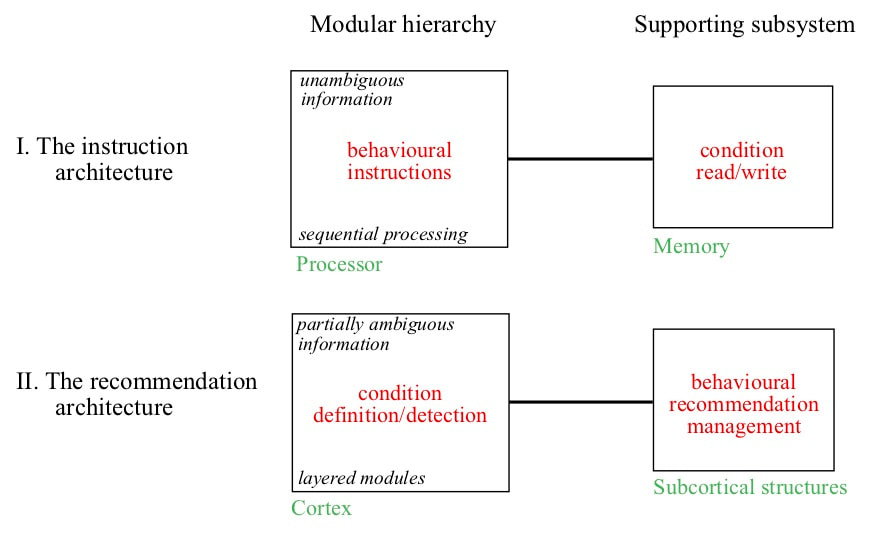
The only possible system architectures for complex control systems:
the instruction architecture for computers and
the recommendation architecture for learning systems like brains
the instruction architecture for computers and
the recommendation architecture for learning systems like brains